|
|
|
|
This
research is aimed at first understanding the principles of biped
locomotion and then developing robots and prosthetic devices. It
involves analysis of biped gait based on ZMP, trajectory optimization,
design, control and experimentation. Several robots have been developed
in our labs ranging from statically stable to dynamically stable
bipedal walkers. Currently our focus is on:
-
Developing
biped robots as under actuated systems and introducing compliance in
the legs for reduced energy consumption during gait. Walk with
deformation at the sole of the foot and at the ground are also being
studied.
-
Developing energy efficient active prosthetic devices for human legs, based on multi-sensory data obtained from human walk.
A few of our robots:
  
Relevant publications in this area:
-
M. Shrivastava, A. Dutta, A. Saxena. “Trajectory generation using GA for an 8 DOF biped robot with deformation at the sole of the foot”, Journal of Intelligent and Robotic Systems, Vol.49, no.1, 2007, pp.67-84.
-
P. Kulkarni, D. Goswami, P. Guha and A. Dutta. “Path planning for a statically stable biped robot using PRM and Reinforcement learning”, Journal of Intelligent and Robotic Systems, vol. 47, 2006, pp. 197-214.
-
Dip Goswami, A. Dutta, L. Behera, “Dynamic Walking of Eight DOF Biped using neural Net Controller”, Proceeding of the SICE International Conference on Instrumentation, Control and Information Technology, Okayama, Japan, 2005, pp. 1885-1890.
-
S. Diwedi, A. Dutta, A. Mukerjee, P. Kulkarni “Development of a Speech Recognition System for Control of a Biped Robot”, Proceedings of the IEEE ROMAN, Kurashiki, Japan, 2004, pp. 601-605.
|
|
|
|
Today
robots have ventured out from industrial applications into human
society in the form of pets, helpers, rehabilitation aids etc. Such
human “friendly” robots have to be designed based on the human control
system so that humans feel at “ease” with them. A few of the projects
under way are:
-
Robot – human interaction:
There are many requirements where a robot and a human have to perform a
task together. This research involves design of human friendly control
systems and sensors. Applications are in rehabilitation where
robots help in feeding, standing up, etc. for disabled or aged persons.
-
Multi agent systems
consisting of multiple robots performing a task together such as
optimal capture of a moving object and taking it to a desired place.
 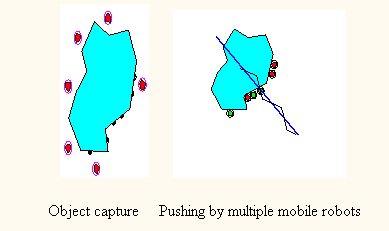
Fig
computing the optimal force closure grasp points for deforming objects
based on camera data
Relevant publications in this area:
-
Pankaj Sharma, Anupam Saxena, Ashish Dutta. Optimal arrest and guidance of a moving prismatic object using multi agents, Robotica (In Press).
-
Pankaj Sharma, Anupam Saxena, Ashish Dutta , “Multi agent form closure capture of a generic 2D polygonal object based on projective path planning,” Proceedings of the ASME 2006 International Design Engineering Technical Conferences, Philadelphia, USA, Sept., 2006, pp.1-8.
-
Pankaj Sharma, Ashish Dutta, Anupam Saxena, “Determination of Optimal Contact Points for Constraining a Prismatic Object by a Group of Mobile Robots”, Proceedings of the IEEE International Conference on Robotics, Automation and Mechatronics, Bangkok, 2006, pp. 86-90.
-
T. Mishra, P. Guha, A. Dutta, and K.S. Venkatesh. “Efficient continuous re-grasp planning for moving and deforming planar objects”, Proceedings of the IEEE International Conference on Robotics and Automation, ICRA, 2006, pp. 2472 – 2477.
|
|
|
This
involves development of micro sensors and actuators for a variety of
applications emulating human like grasping slip control, vibration
control, compliant motion generation etc. A few research areas
are :
- Design of partially compliant 4 bar mechanism

Fig. Partially compliant 4 bar mechanism using IPMC for variable path generation
- Development of fingertip sensors for grasping force control

Fig.
Matrix micro sensors for robotic fingertips.
Fig. Three
finger hand
Relevant publications:
-
D. Bandopadhya, B. Bhattacharya, A. Dutta. “An Active Vibration Control Strategy for a Flexible Link Using Distributed Ionic Polymer Metal Composites”, Smart Materials and Structures, Vol.16, 2007, pp. 617-625
-
D. Bandopadhya, B. Bhattacharya, A. Dutta. “Modeling of Hybrid Damping Scheme Using Smart Magnetostrictive Composites for Flexible Manipulator", Journal of Reinforced Plastics and Composites, 2007, (DOI 10.1177/0731684407076743).
-
Dibakar Bandopadhya, Bishakh Bhattacharya, Ashish Dutta. “Active vibration control strategy for a single link flexible manipulator using ionic polymer metal composites”, Journal of Intelligent Material Systems and Structures, 2006, (DOI 10.1177/1045389X07076277).
-
D. Bandopadhya, A. Dutta, B. Bhattacharya, “Active vibration suppression for a flexible link using IPMC”, Proceedings of the IEEE International Conference on Robotics, Automation and Mechatronics, Bangkok, 2006, pp. 28-33.
-
D. Goswami, L. Behera and Ashish Dutta, “Simulation and Experiments on a Robot Arm”, Proceedings of the International Conference on Computational Intelligence, Robotics and Autonomous Systems (CIRAS), Singapore, 2005.
-
Dibakar Bandopadhya, Ashish Dutta, Bishakh Bhattacharya, “Pseudo-Rigid Body Modeling of a 4-bar Mechanism Having IPMC Based Rocker”, Proceedings of the IEEE Multi Conference on Systems and Control, Singapore, 2007 (To appear).
-
Swagat Kumar, Amit Shukla, Ashish Dutta, Laxmidhar Behera. “A model-free redundancy resolution technique for visual motor coordination of a 6 DOF robot manipulator”, Proceedings of the IEEE International Symposium on Intelligent Control, Singapore, 2007. (To appear) .
-
Dibakar Bandopadhya, Bishakh Bhattacharya, Ashish Dutta, “Passive and Active Damping Characteristics of IPMC as Smart Actuator”, Proceedings of the IEEE Multi Conference on Systems and Control, Singapore, 2007. (To appear)
|
|
The two areas being looked at are i) sensitizing the gripper of surgical robots for force feedback to the surgeon during surgery, and ii) design of exoskeleton for human hand.
The design of sensors for surgical robots is being done in
collaboration with the Dept. of Computer Science, Univ. of Verona,
Italy. Design of exoskeleton will be used for rehabilitation
applications and to support the elderly who have lesser control of
their hands due to old age.
Fig. Sensitizing grippers for surgical robots.
|