The following paragraphs discuss some of the basic concepts of LiDAR technology, which are important to understand technology and the data generated.
In this case a continuous beam of Electromagnetic Radiation (EMR) (light here) is used to measure the distance between transmitter and reflector. This is realized through the measurement of phase difference between transmitted and received wave. As shown in Figure 8, the time of travel can be written as:
Where n is the total number of full wavelengths, T is time taken by light to travel equal to one wavelength and φ is the phase difference. The only unknown in above is n which is determined using the techniques like decade modulation. So range is given by:

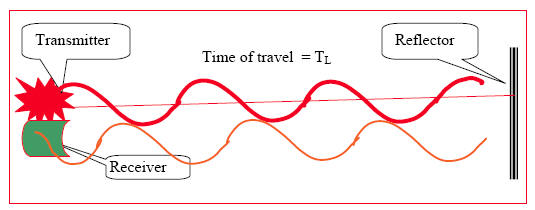
Figure 8 Continuous wave for phase difference measurement
The above shows that the range resolution depends upon the resolution of phase difference measurement and as well on the wavelength used. The advantage of CW measurement is that highly accurate measurements can be realised (as the accuracy of measurement is dependent upon the shortest wavelength used). However, it is difficult to generate continuous wave of high energy thus limiting the range of operation of these instruments. The slant range in case of airborne LiDAR is large thus the CW principle of ToT measurement is generally not used in these sensors.
The maximum range that can be measured by the CW LiDAR depends on the longest wavelength used, as shown below: