The various sensor components fitted in the LiDAR instrument possess different precision. For example, in a typical sensor the range accuracy is 1-5 cm, the GPS accuracy 2-5 cm, scan angle measuring accuracy is 0.01°, INS accuracy for pitch/roll is < 0.005° and for heading is < 0.008° with the beam divergence being 0.25 to 5 mrad. However, the final vertical and horizontal accuracies that are achieved in the data are of order of 5 to 15 cm and 15-50 cm at one sigma. The final data accuracy is affected by several sources in the process of LiDAR data capture. A few important sources are listed below:
· Error due to sensor position due to error in GPS, INS and GPS-INS integration.
· Error due to angles of laser travel as the laser instrument is not perfectly aligned with the aircraft’s roll, pitch and yaw axis. There may be differential shaking of laser scanner and INS. Further, the measurement of scanner angle may have error.
· The vector from GPS antenna to instrument in INS reference system is required in the geolocation process. This vector is observed physically and may have error in its observation. This could be variable from flight to flight and also within the beginning and end of the flight. This should be observed before and after the flight.
· There may be error in the laser range measured due to time measurement error, wrong atmospheric correction and ambiguities in target surface which results in range walk.
· Error is also introduced in LiDAR data due to complexity in object space, e.g., sloping surfaces leads to more uncertainty in X, Y and Z coordinates. Further, the accuracy of laser range varies with different types of terrain covers.
· The divergence of laser results in a finite diameter footprint instead of a single point on the ground thus leading to uncertainty in coordinates. For example, if sensor diameter Ds = 0.1 cm; divergence= 0.25 mrad; and flying height 1000m, the size of footprint on the ground is Di= 25 cm. Varying reflective and geometric properties within footprint also lead to uncertainty in the coordinate.
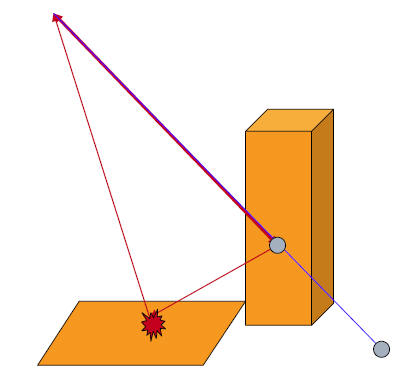
· As shown in Figure 22, a laser may reflect in specular fashion from the wall of a building thus sending the pulse to some other than the instrument direction. Further, from the ground diffuse reflection takes place and a signal is captured at the sensor corresponding to this pulse. This will result in computation of a point which was never measured by the LiDAR, thus constitutes an outlier or an spurious data.
Figure 22: Multipath in LiDAR results in spurious data points