A laser pulse has a finite diameter (~10 cm and larger). It is possible that only a part of the diameter comes across an object. This part of pulse will reflect from there, while the rest of the pulse keeps travelling till it encounters other objects which result in reflection of other parts of the pulse. On receiving the reflected laser pulse, the detector triggers when the in-coming pulse reaches a set threshold, thus measuring the time-of-flight. The sampling of the received laser pulse can be carried out in different ways- sampling for the most significant return, sampling for the first and last significant return, or sampling all returns which are above threshold at different stages of the reflected laser waveform. Accordingly, the range is measured to each of those points wherefrom a return occurred to yield their coordinates.
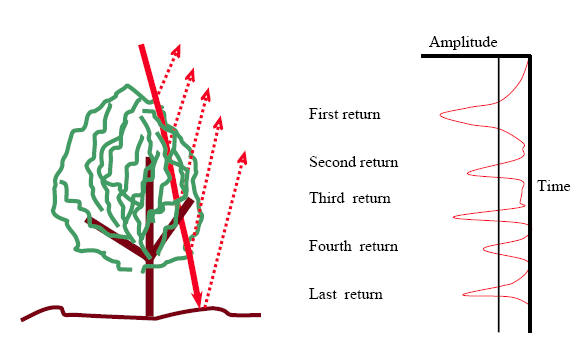
Figure 6: Example of multiple returns from a tree
In the figure shown above the first return is the most significant return. In case of capturing of only most significant return the coordinate of the corresponding point (here the top of tree) only will be computed. Capturing of first and last returns as shown above will result in determination of the height of the tree. It is important to note that last return will not always from the ground. In case of a laser pulse hitting a thick branch on its way to ground the pulse will not reach ground thus no last return from ground. The last return will be from the branch which reflected entire laser pulse. Commercially available sensors at present support up to 4 returns from each fired laser pulse and provide the option to choose among first, first and last and all 4 returns data.