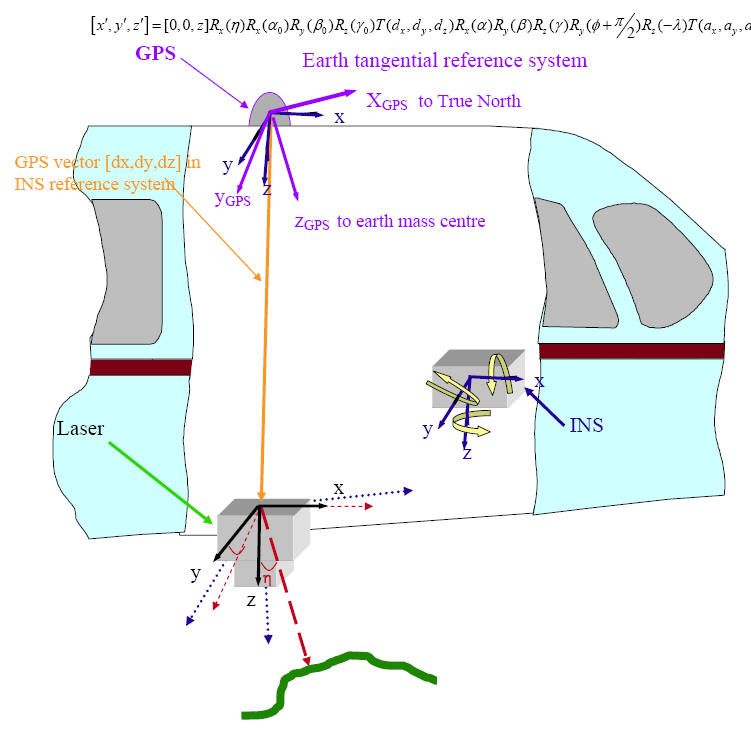
Range measurement is represented as a vector [0,0,z] in temporary scanning system. Rotate this vector in instrument reference system using scan angle (h). Further rotate the vector in INS reference system with origin at instrument using the mounting angle biases (a0 b0 g0). Now this vector is translated by GPS vector [dx,dy,dz] measured in INS reference system. Next step is to rotate the vector to the ET system using roll, pitch, raw (a b g). At this stage the vector is in ET system with origin at GPS antenna. Now rotate the vector in WGS-84 Cartesian system with origin at GPS antenna, using antenna latitude and longitude (f, l), which are measured by GPS. The vector is translated in Earth-centered WGS-84 system using Cartesian coordinates of antenna (ax, ay , az), as observed by the GPS. The vector now refers to the Cartesian coordinates of laser footprint in WGS84, which can be converted in ellipsoidal system. If Rx(θ) is rotation about x axis by θ angle, T(V) is translation by a vector V, [X’] is final vector in WGS-84 system and φ and λ are latitude and longitude of GPS antenna at the time of laser shot the aforesaid steps can be written as:
Figure 15: Relationship between laser scanner, INS and GPS and various reference systems.
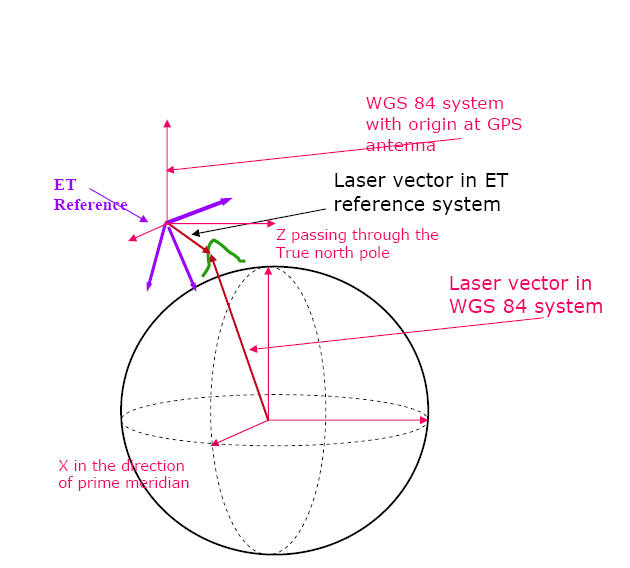
Figure 16: Relationship between ET and WGS-84 system