HW1
Part1
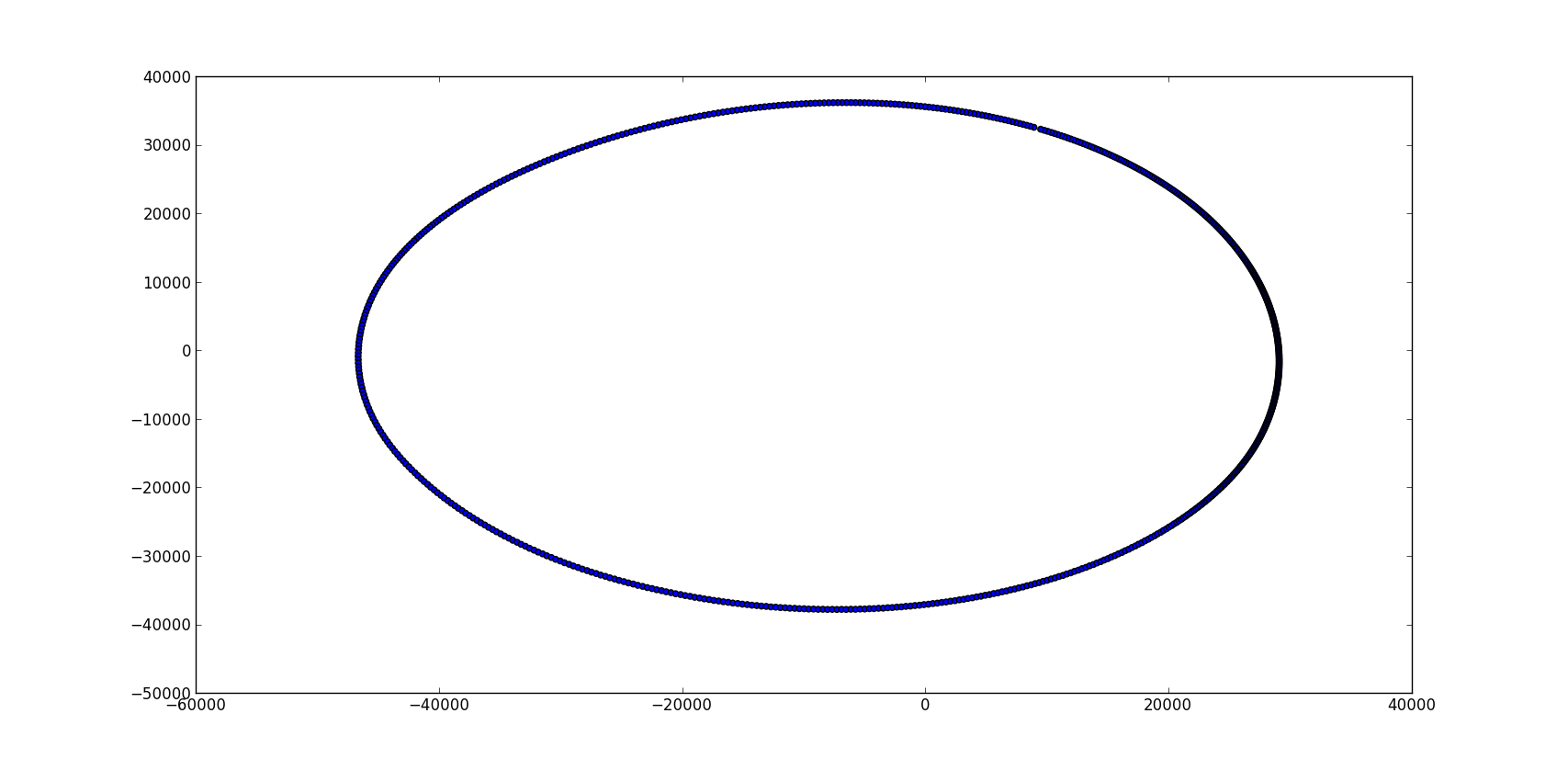
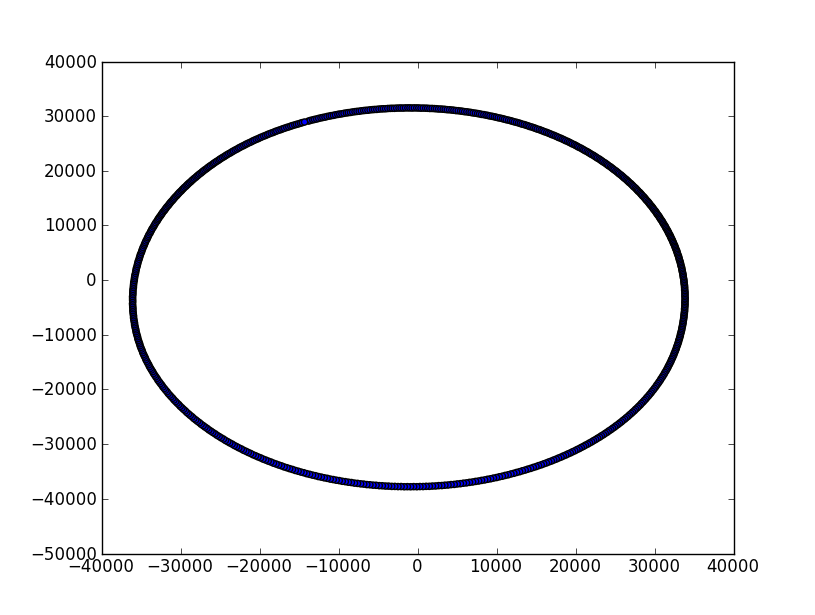
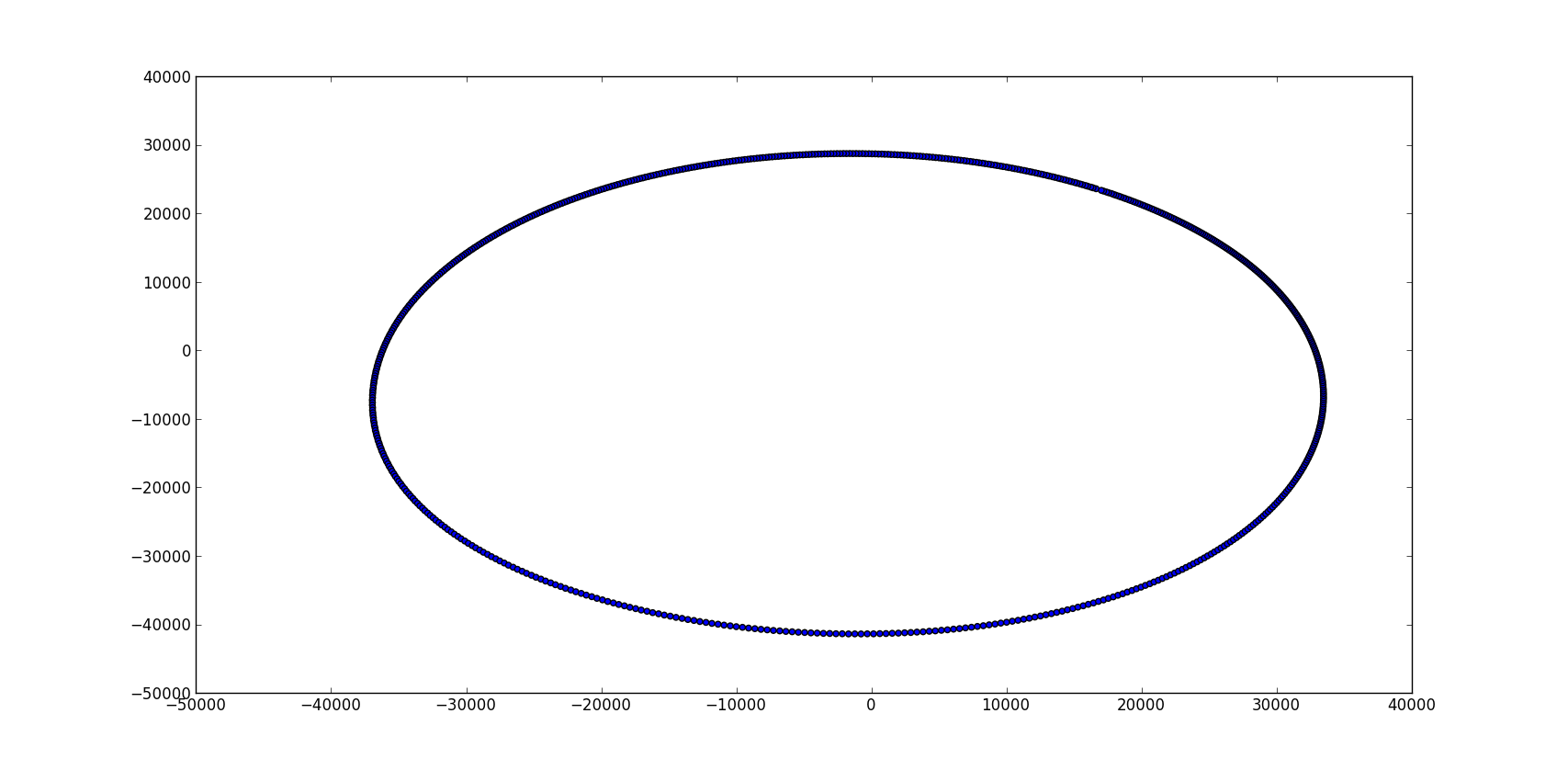
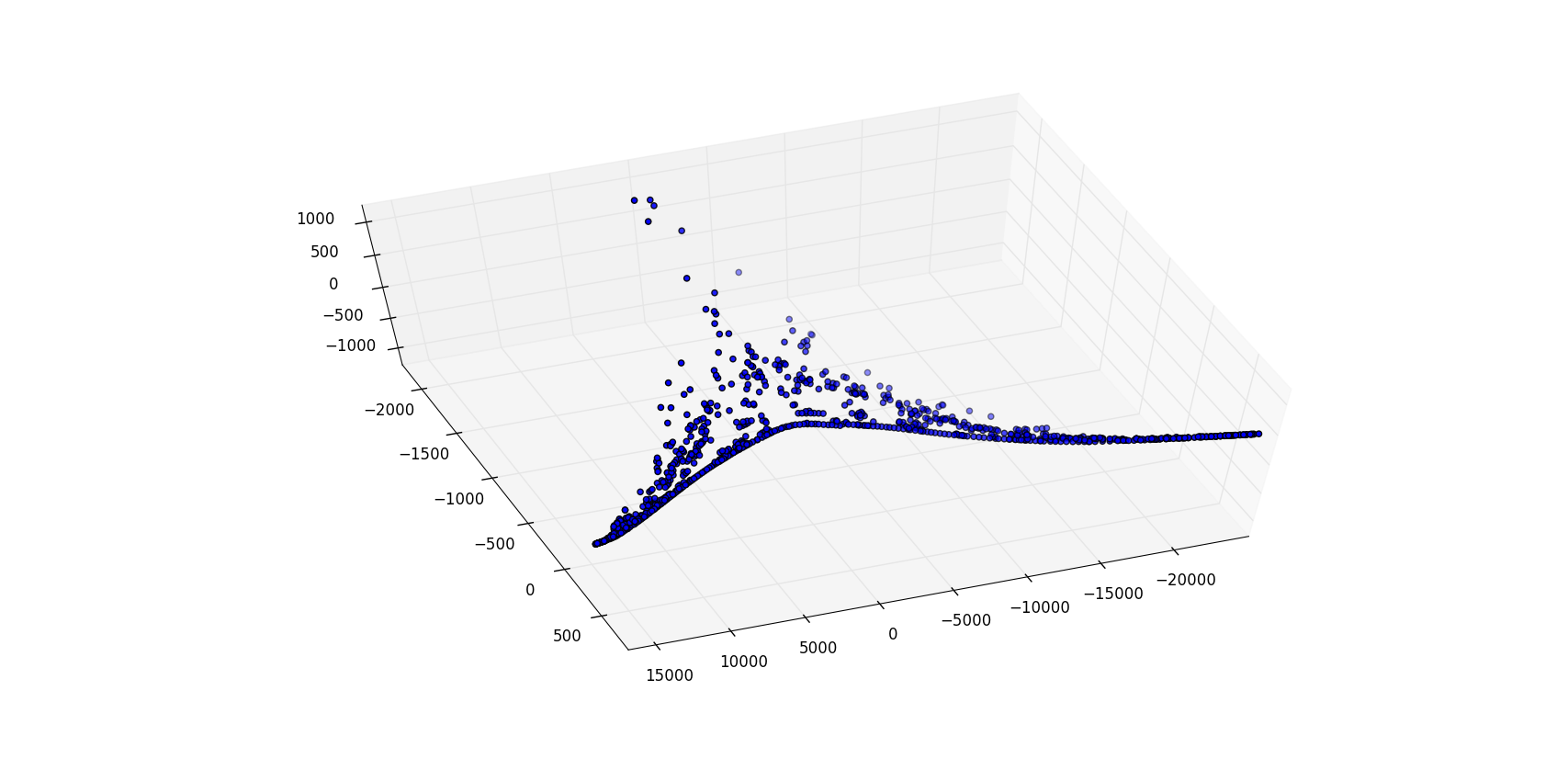
The robot was rotated for 720 points about three different coordinates.Manifold obtained are:
(a)0,0
(b)100,-100
(a)50,25
 We can infer from the manifold that it has one degree of freedom as expected.
We can infer from the manifold that it has one degree of freedom as expected.
Part2
Random position
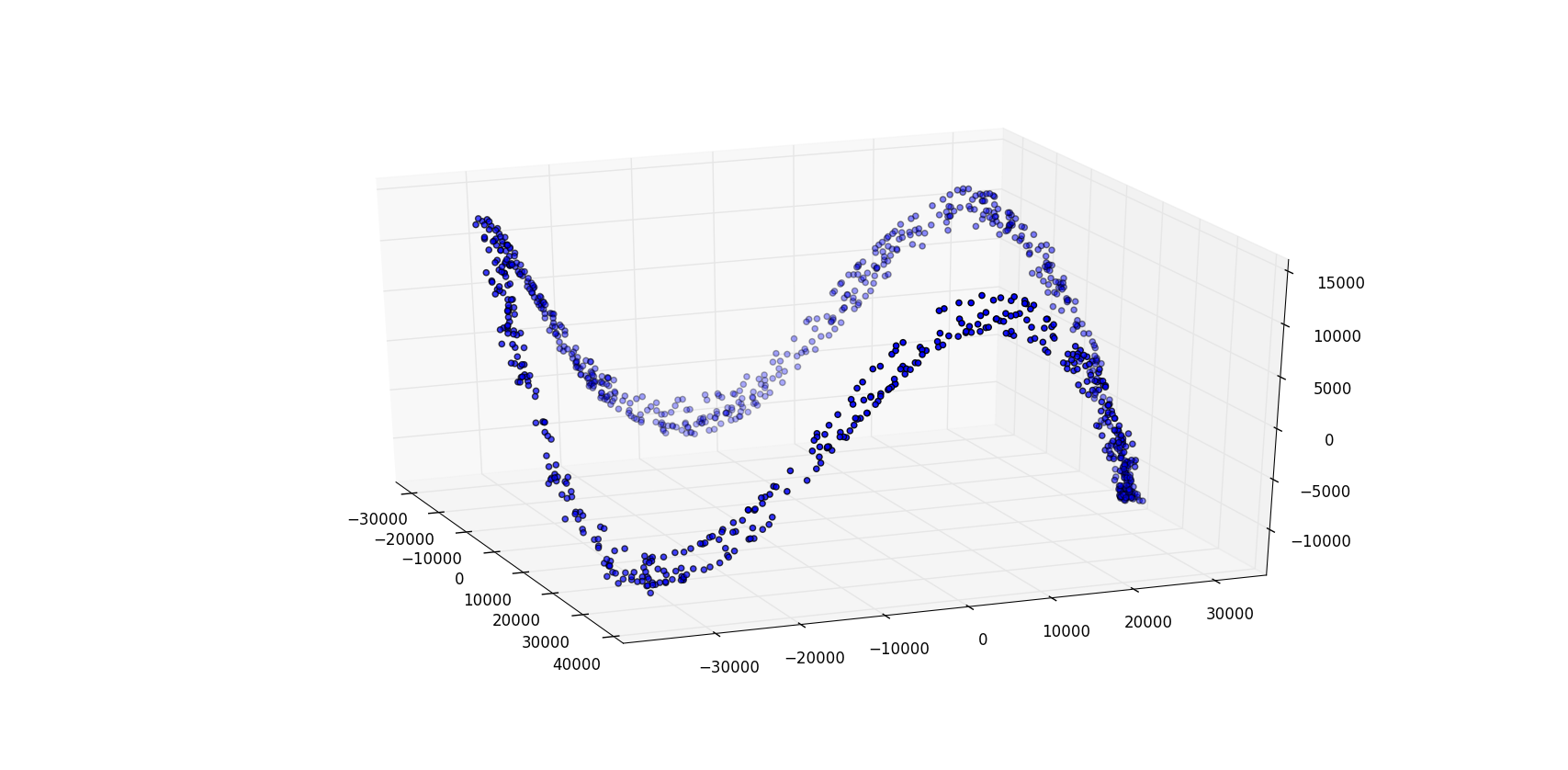 Random trajectory
Random trajectory
Part3
For 100 test images
localization error=85.2167485
Part4
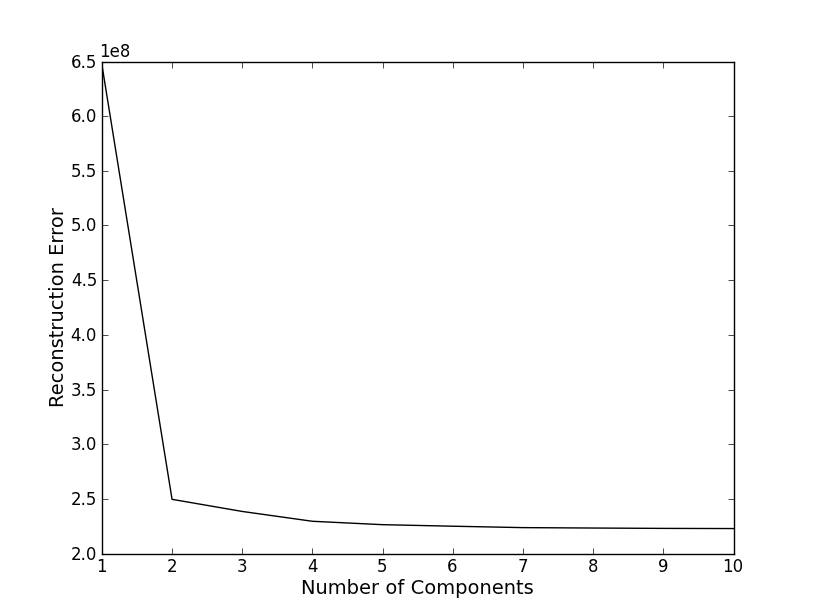
Reconstruction error for part 1
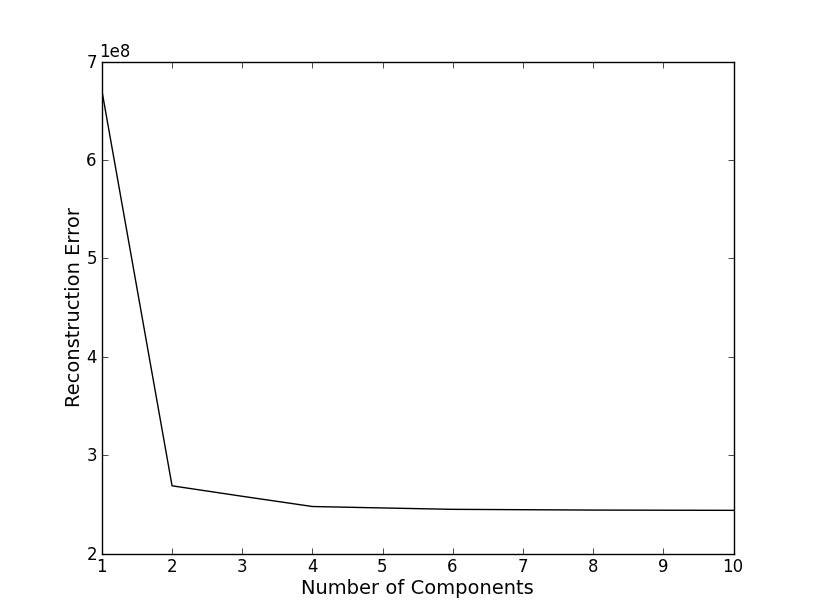
 Reconstruction error for part 2
Reconstruction error for part 2
Answers of questions
1. Yes, it is important to have texture on the walls otherwise multiple values of (x,y,theta) would correspond to same
image.
2. If the third coordinate (which was varied) would have been z instead of theta then the manifold would have been an
open curve instead of closed (multiple values of theta correspond to same direction).
3. The first question points to one of the limitations of this method. This method assumes one to one correspondence
between input and output.
code