Dr. Ashish Dutta
Indian Institute of Technology

Indian Institute of Technology
 |
|
|||||||||||
Design of an optimal |
Outline:
Objective : understanding synergy between: hand kinematics - muscles - brain.
§ Human finger motion biomechanics.
§ Optimal design of a hand exoskeleton.
§ Hybrid control (EEG+EMG+Dynamics)
Finger biomechanics:
•How do humans perform simple object manipulation (rotation + translation) ?
|
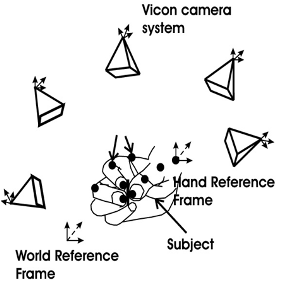
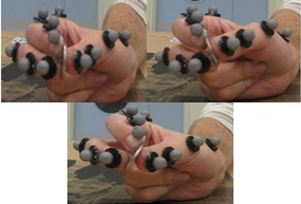
Simple task of moving a coin and its motion analysis(NAIST Japan):
- 30 subjects performed this task.
|
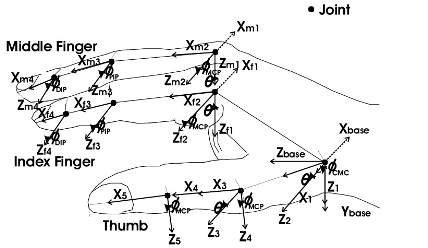
Axes notation for each joint:
|
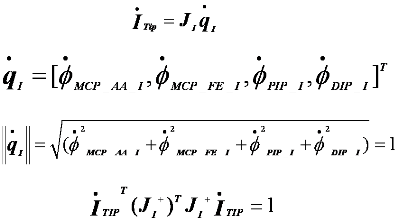
Manipulability calculation based on joint positions:
|
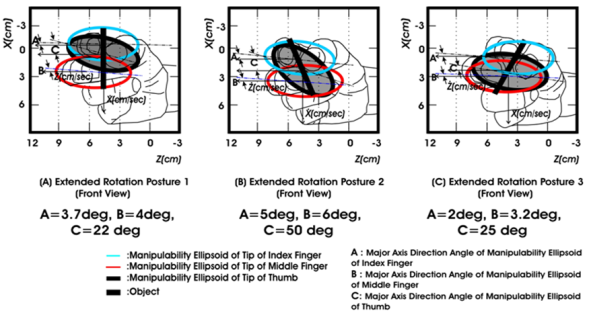
Ellipsoid calculations:
•Activity of each finger : •Ellipsoid volume •Direction of major axis of ellipsoid •Ratio of axes 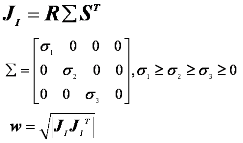
|
Rotations and 3D motion:
|
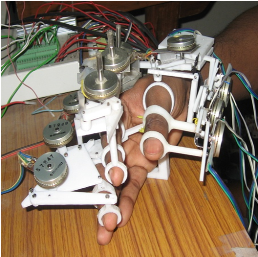
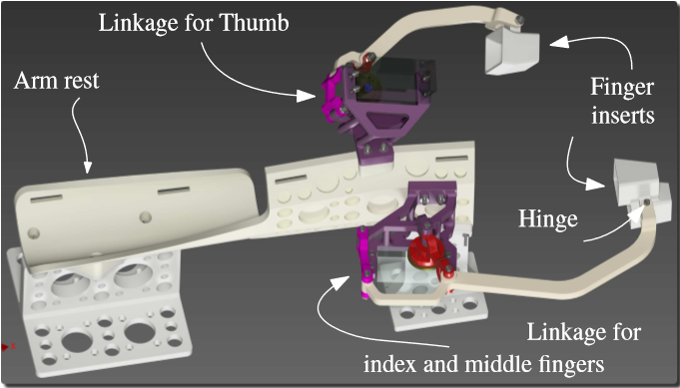
Design of finger exoskeleton:
•Three finger exoskeleton (index-middle-thumb). •Grasping and simple manipulation ability. •Control using EMG / EEG, Inverse kinematics. •Use in stroke rehabilitation, assistive robot, physical therapy.
|
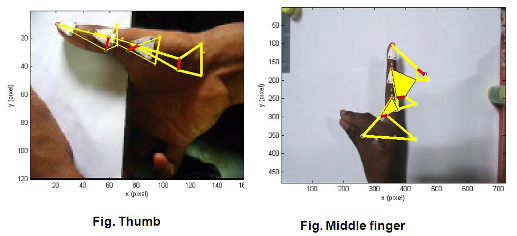
Thumb and middle finger:
|
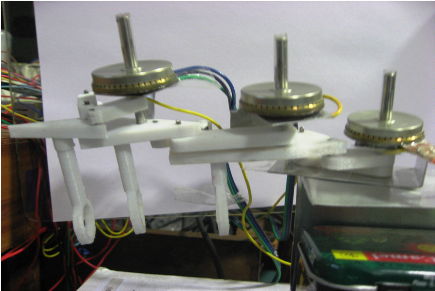
Links made by rapid prototyping and actuated by ultrasonic motors:
|
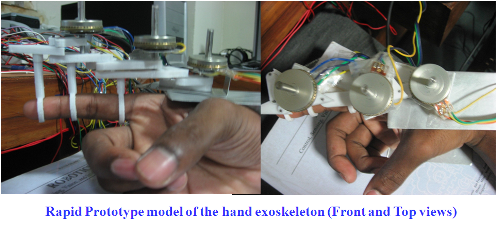
Fabrication of the exoskeleton: Rapid prototyping:
|
Three finger exoskeleton for exact finger motion emulation:
- 10 DOF actuated by ultrasonic motors. - Both translations and rotations are possible. - Control : NN and Inverse Kinematics
|
New 4 DOF Two finger exoskeleton for Stroke Rehabilitation
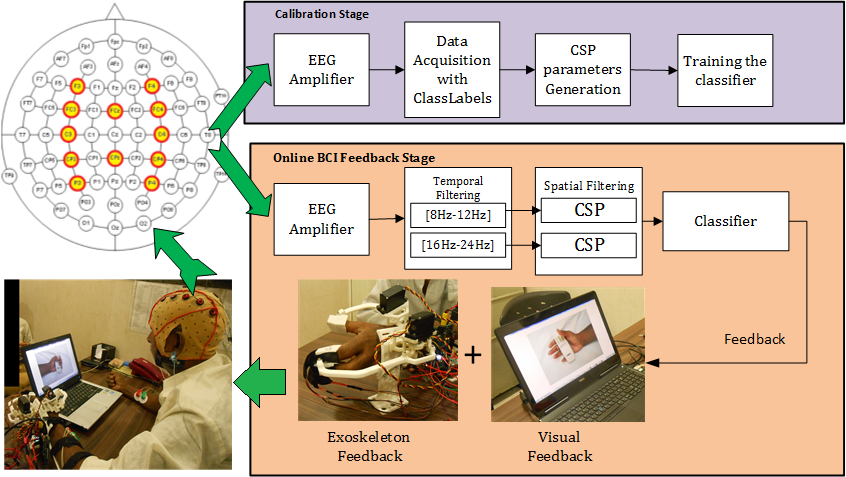
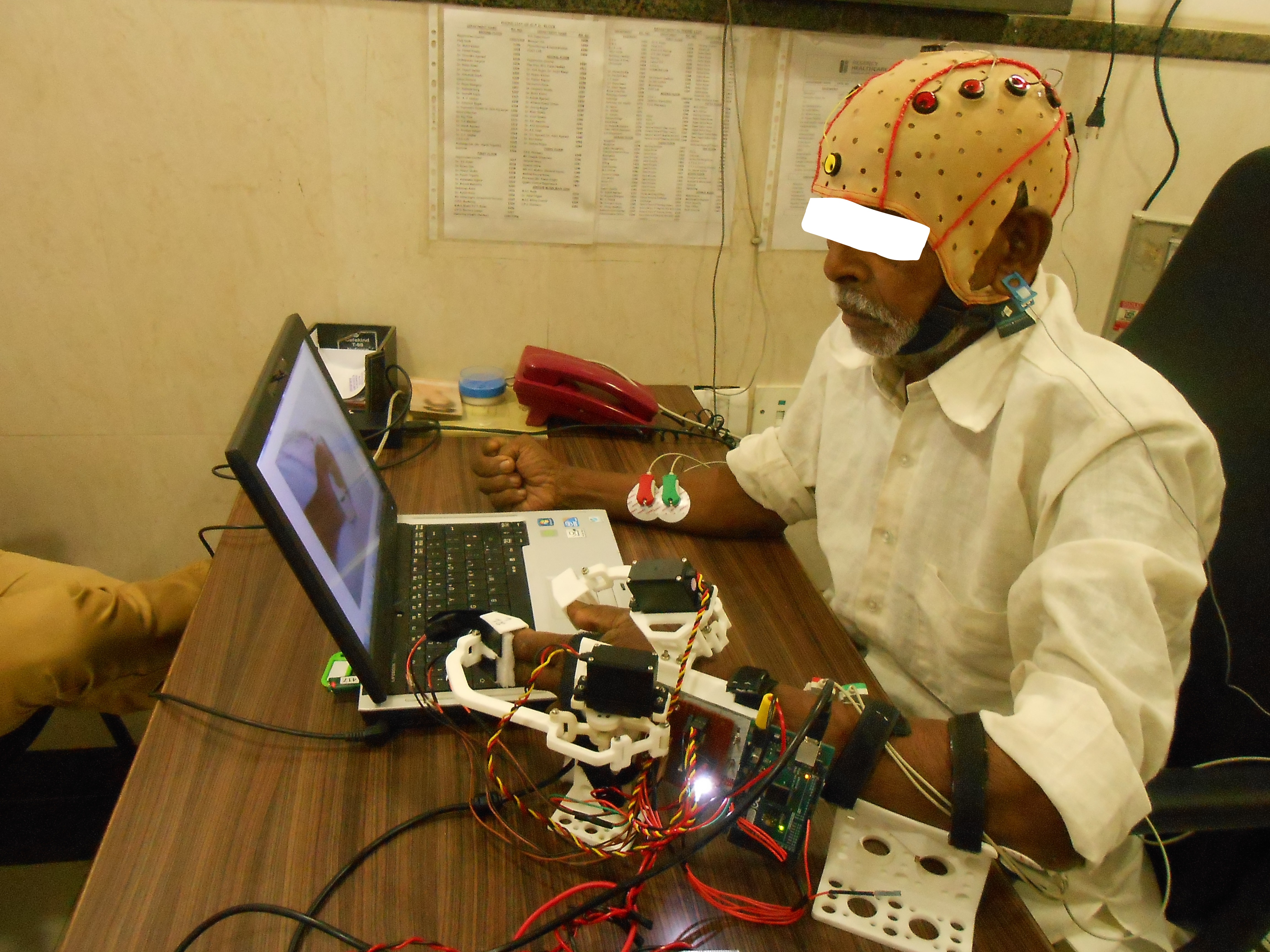
Hybrid control:
|
Augment EMG with EEG for Control
Flow chart of the control strategy: EMG + EEG signal recording - Feature extraction and classification - control of joint motors.
|