Dr. Ashish Dutta
Indian Institute of Technology

Indian Institute of Technology
 |
|
|||||||||||
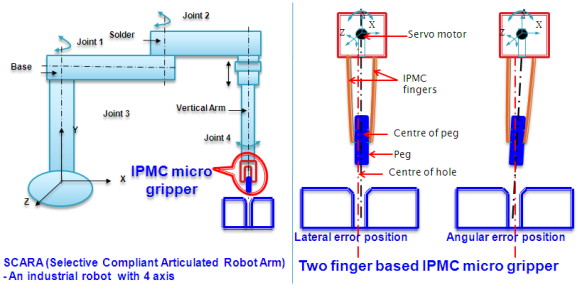
Design, analysis and experimentation of a compliant IPMC micro gripper for peg-in-hole assembly using a SCARA robot |
Proposed design of compliant IPMC micro gripper
|
|
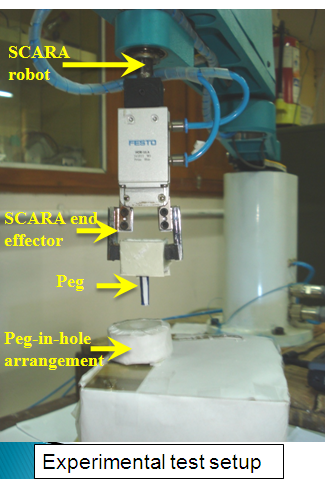
Experimental test setup for SCARA based assembly
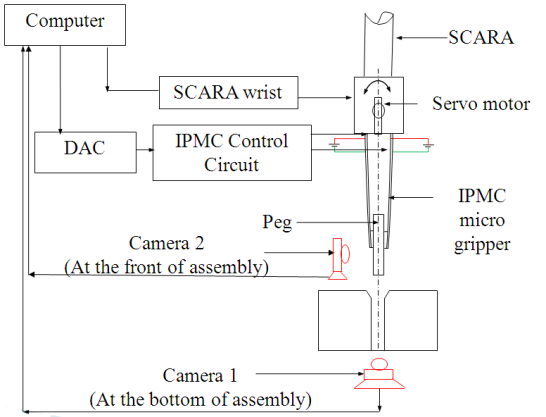
Connection diagram for SCARA based peg-in-hole assembly
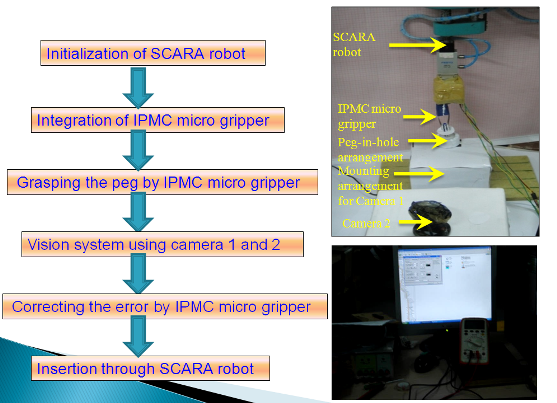
Testing steps for peg-in-hole assembly
Peg-in-assembly without compliance: Peg is held by SCARA end effector
|