Dr. Ashish Dutta
Indian Institute of Technology

Indian Institute of Technology
 |
|
|||||||||||
 |
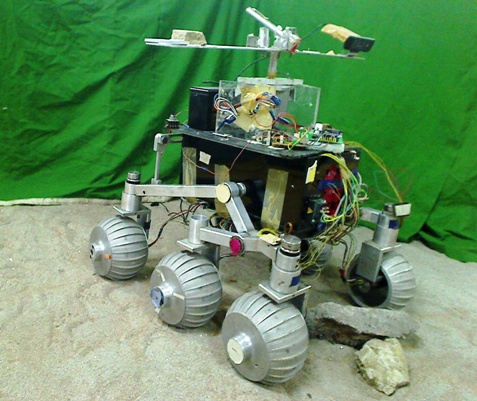
Lunar Rover:
Design & Kinemetic.
3D terrain generation using structure light and vision system.
Path palnning of lunar rover.
Path tracing and error correction.
|
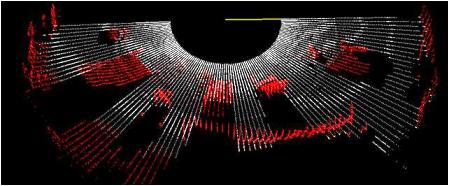
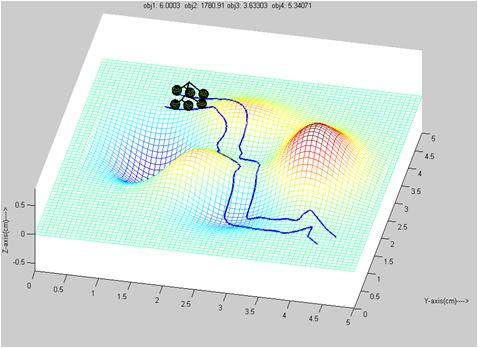
Structured Light Scanning of surface and path planing:
|
|
Multi agent Systems:
Optimal capture of a moving object by a group of mobile robots.
Optimal pushing of a captured robot to a goal point.
Development of vision based control algorithms for optimal path planning.
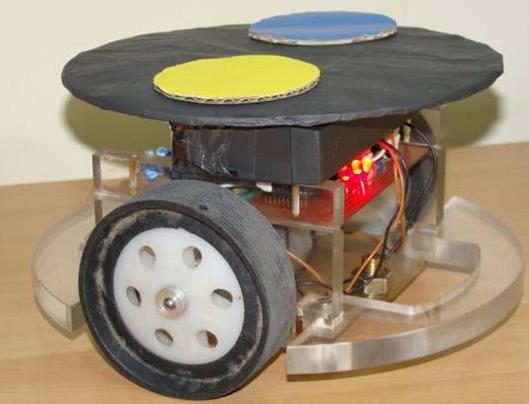
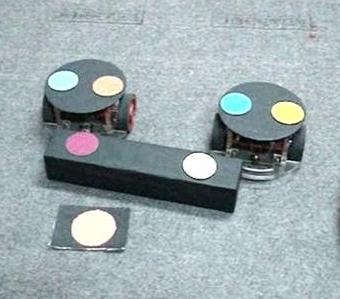
Fig. Robots developed in our labs for multi agent systems research
Fig. Optimal capture of a moving object using the least number of robots and pushing it optimally to a desired goal point.
Vision based Intelligent control:
Real time vision based capture of deforming and moving objects by a three finger robot hand.
Fig. Optimal capture points satisfying force closure, best points found in real time on a deforming object.
Robot human Interaction and fingertip sensors:
Development of fingertip sensors and impedance controllers for human like motion.

Relevant publications in this area:
|