Dr. Ashish Dutta
Indian Institute of Technology Kanpur

Indian Institute of Technology Kanpur
 |
|
|||||||||||
Objectives: Energy optimal trajectory generation for climbing stairs, walking on flat ground using Genetic Algorithms.
New optimal design of biped robots with soft sole, compliant links, torsion springs at the joints etc. for reduced
energy consumption during walk.
Design of learning based controllers using NN, Reinforcement learning etc.

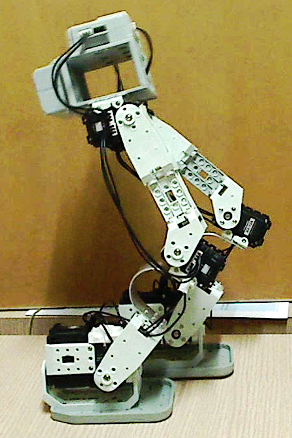
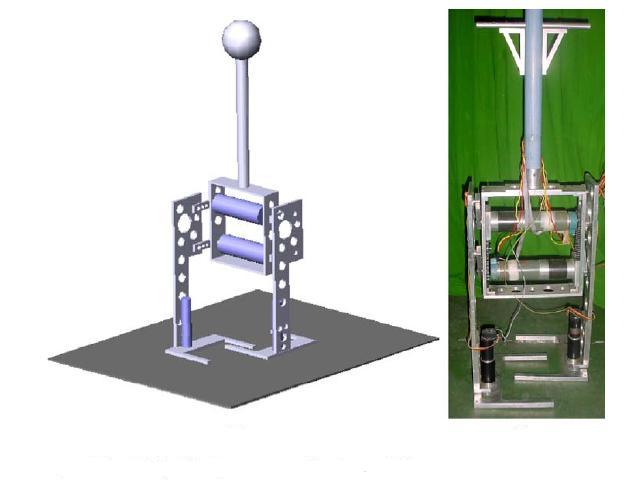
Fig. The statically stable biped robot having 4 DOF, CAD model and fabricated robot that can walk straight and turn.
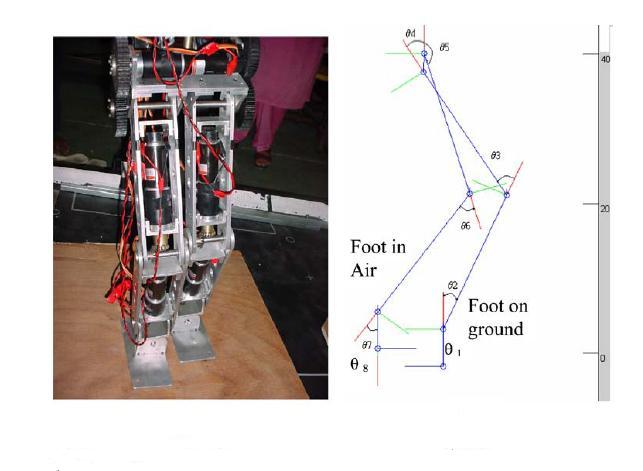
Fig. The 8 DOF robot developed that can walk, climb stairs etc. based on the Zero Moment Point control.

Fig. Energy optimal stair climbing
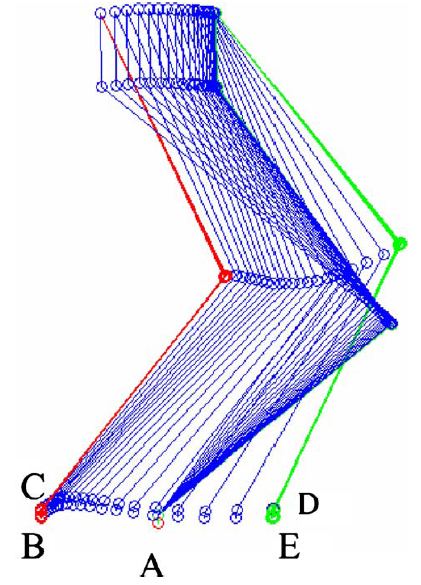
Fig. Energy optimal trajectory of a biped robot with soft sole for reduced energy consumption during gait.
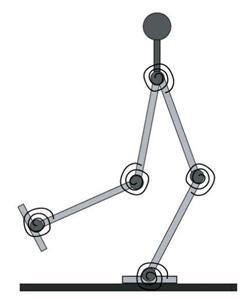
Fig. New biped design with torsion springs at the joints for reduced energy consumption during walk.
Relevant publications in this area:
