Development of micro sensors and actuators for a variety of
applications emulating human like grasping slip control, vibration
control, compliant motion generation etc. A few research areas
are :

- Design of partially compliant 4 bar mechanism
using Ionic Polymer Metal Composites
 
Fig. Partially compliant 4 bar mechanism using IPMC for variable path generation
- Development of fingertip sensors for grasping force control
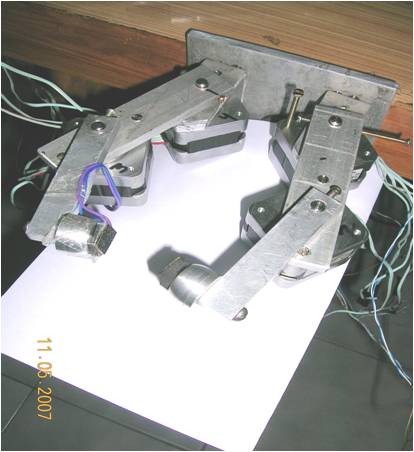

Fig.
Matrix micro sensors for robotic fingertips.
Fig. Three
finger hand
Relevant publications:
-
D. Bandopadhya, B. Bhattacharya, A. Dutta. “An Active Vibration Control Strategy for a Flexible Link Using Distributed Ionic Polymer Metal Composites”, Smart Materials and Structures, Vol.16, 2007, pp. 617-625
-
D. Bandopadhya, B. Bhattacharya, A. Dutta. “Modeling of Hybrid Damping Scheme Using Smart Magnetostrictive Composites for Flexible Manipulator", Journal of Reinforced Plastics and Composites, 2007, (DOI 10.1177/0731684407076743).
-
Dibakar Bandopadhya, Bishakh Bhattacharya, Ashish Dutta. “Active vibration control strategy for a single link flexible manipulator using ionic polymer metal composites”, Journal of Intelligent Material Systems and Structures, 2006, (DOI 10.1177/1045389X07076277).
-
D. Bandopadhya, A. Dutta, B. Bhattacharya, “Active vibration suppression for a flexible link using IPMC”, Proceedings of the IEEE International Conference on Robotics, Automation and Mechatronics, Bangkok, 2006, pp. 28-33.
-
D. Goswami, L. Behera and Ashish Dutta, “Simulation and Experiments on a Robot Arm”, Proceedings of the International Conference on Computational Intelligence, Robotics and Autonomous Systems (CIRAS), Singapore, 2005.
-
Dibakar Bandopadhya, Ashish Dutta, Bishakh Bhattacharya, “Pseudo-Rigid Body Modeling of a 4-bar Mechanism Having IPMC Based Rocker”, Proceedings of the IEEE Multi Conference on Systems and Control, Singapore, 2007 (To appear).
-
Swagat Kumar, Amit Shukla, Ashish Dutta, Laxmidhar Behera. “A model-free redundancy resolution technique for visual motor coordination of a 6 DOF robot manipulator”, Proceedings of the IEEE International Symposium on Intelligent Control, Singapore, 2007. (To appear) .
-
Dibakar Bandopadhya, Bishakh Bhattacharya, Ashish Dutta, “Passive and Active Damping Characteristics of IPMC as Smart Actuator”, Proceedings of the IEEE Multi Conference on Systems and Control, Singapore, 2007. (To appear)
|


