Projects
Hobby Projects
Rubik’s Cube Solver Robot
Project Wiki
Summer Project under Robotics Club, IIT Kanpur, May’11-July’11
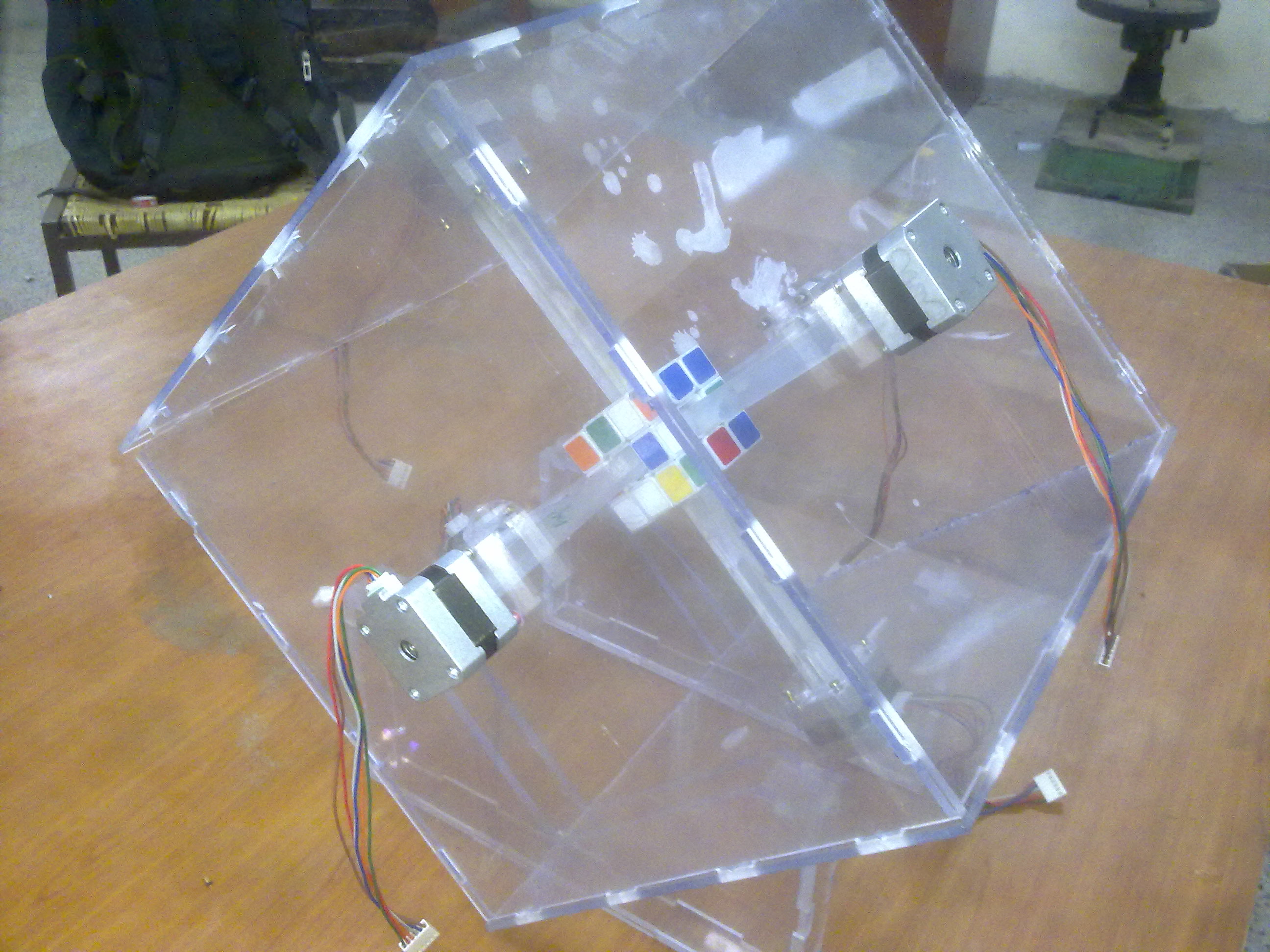
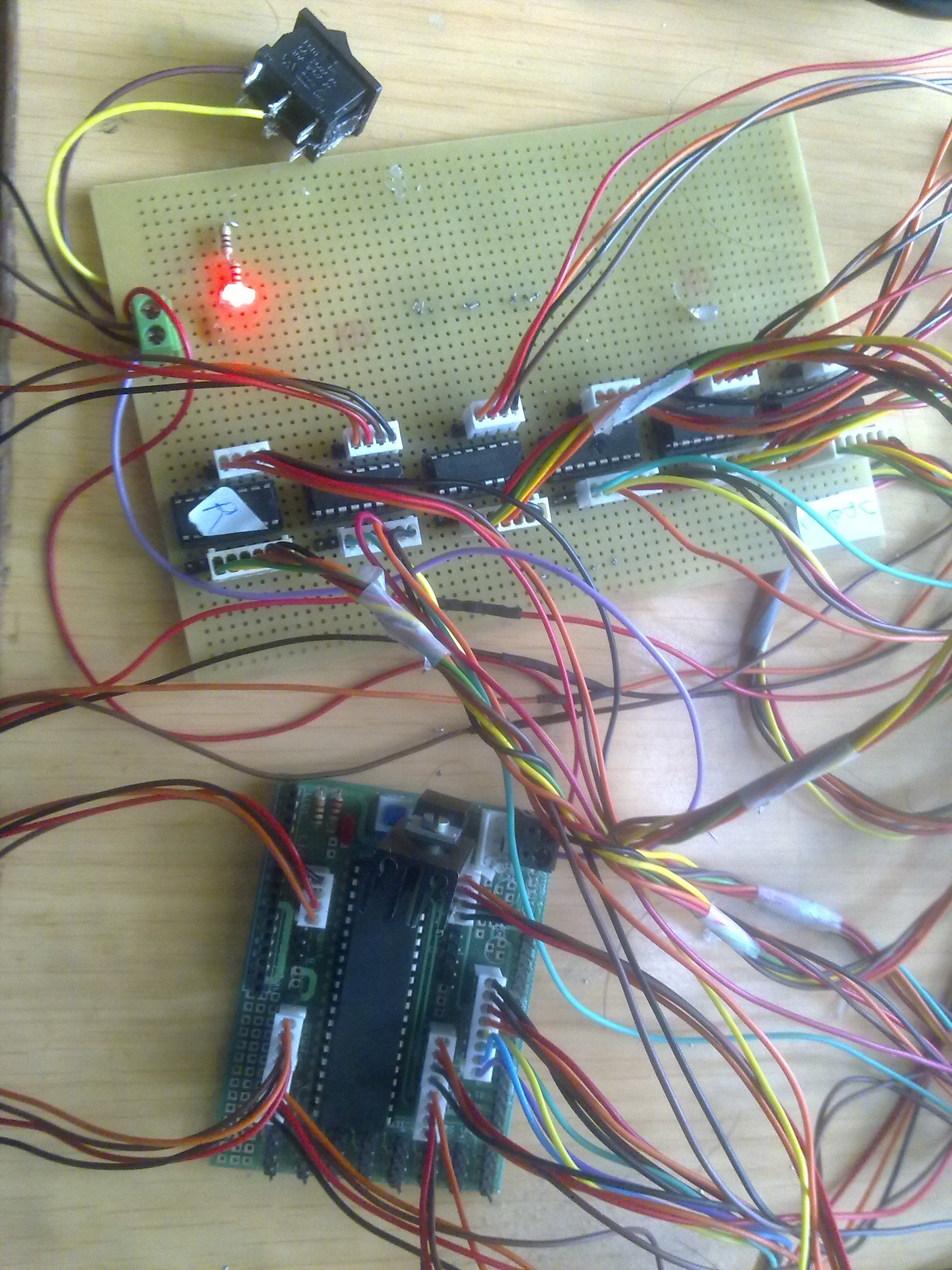
Abstract : Built a robot capable of recognizing any given orientation of a Rubik’s cube via Image Processing using Open CV and subsequently perform the steps required to solve the cube. The robot employs six high torque stepper motors, one each for rotating the six faces of the cube. The image processing is handled by a laptop processor which then communicates the results to the AtMega based micro-controller used to drive the robot.
Click Here to view an article published in the IIT Kanpur Campus Magazine, NERD.

Internal Combustion Engine powered RC Car
Sponsor: IIT Kanpur Motor Sports, Society of Automotive Engineers (SAE), Nov’11-Jan-12
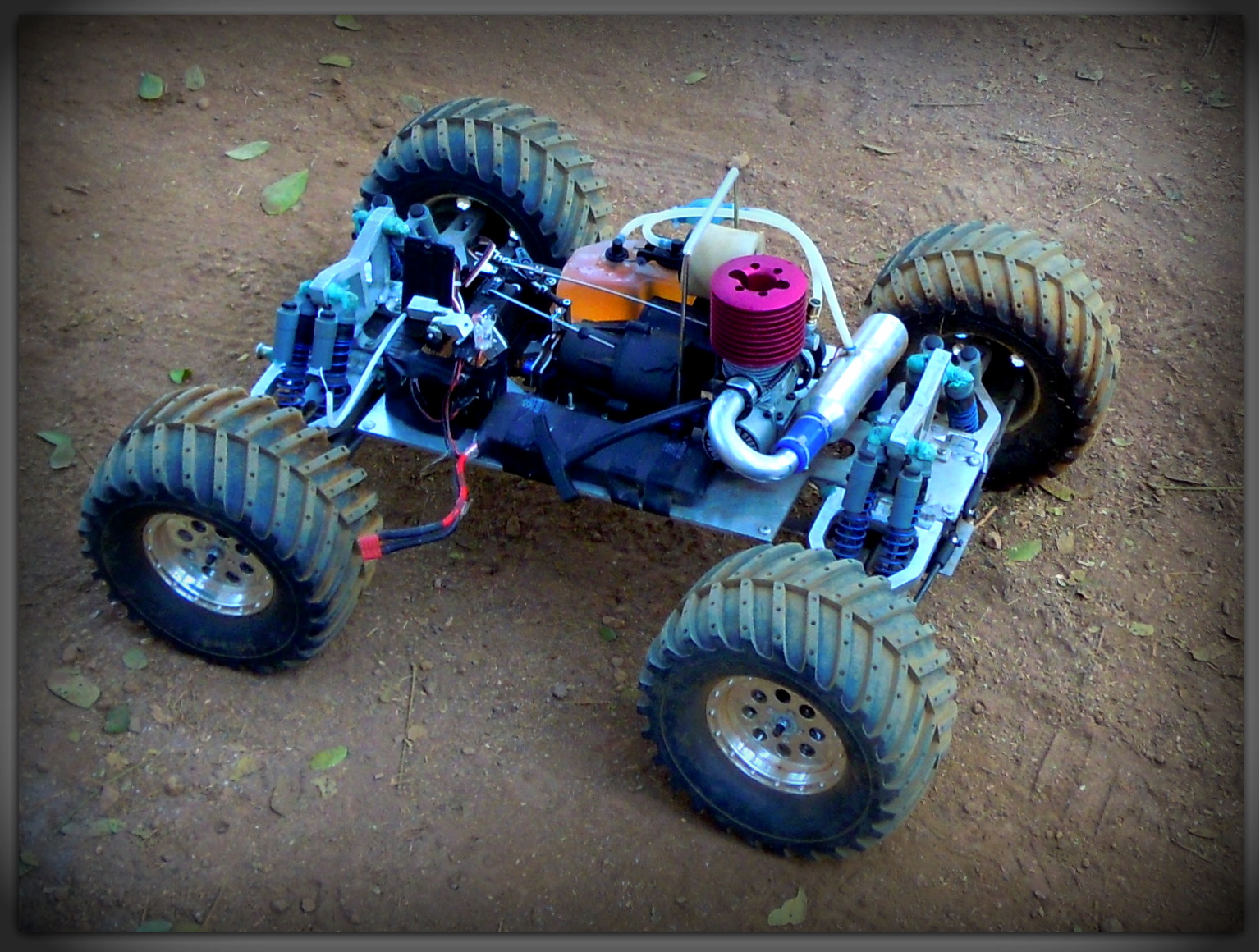
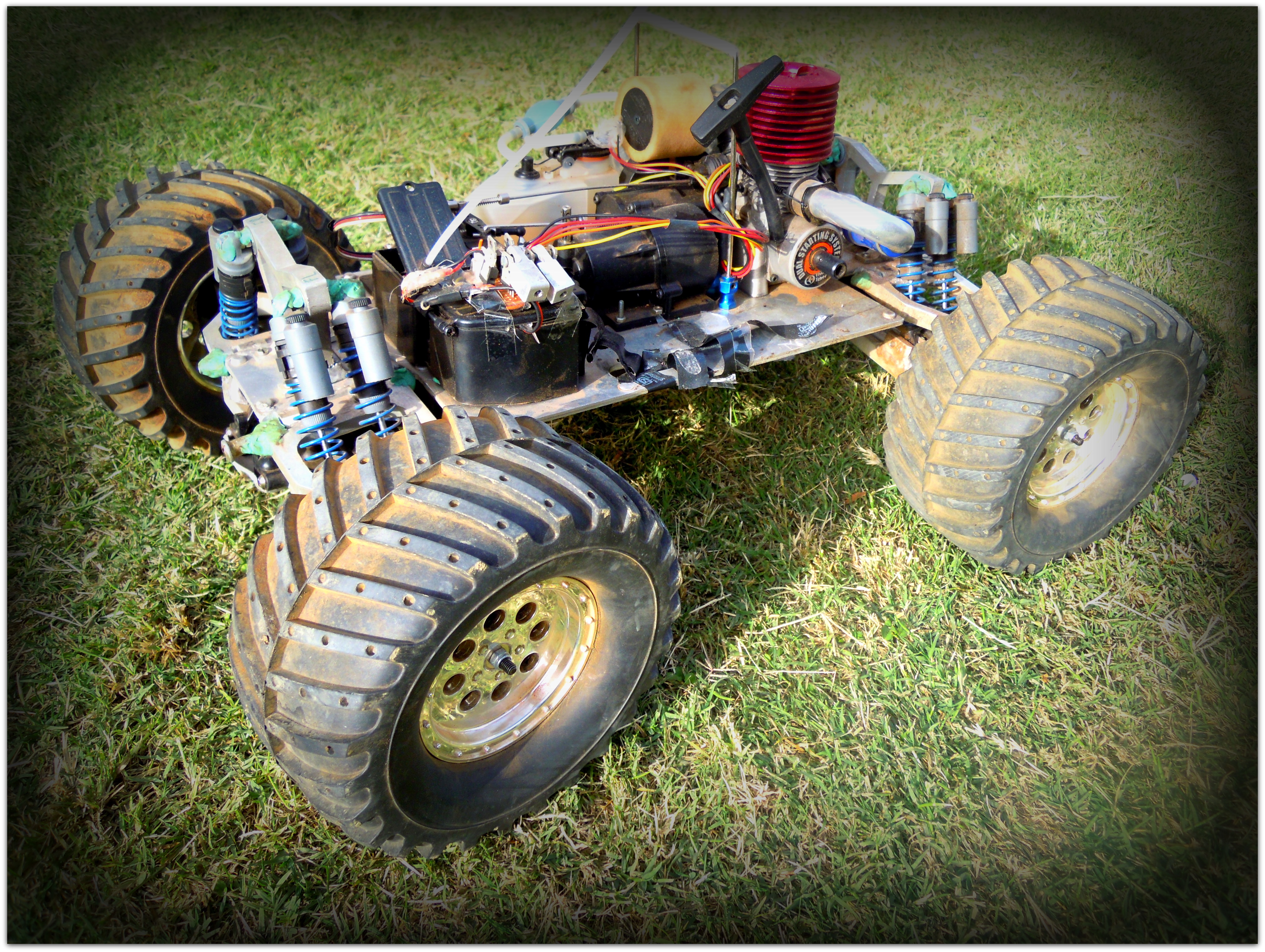
Abstract : Designed and fabricated a radio-controlled car complete with self-manufactured chassis, braking, steering and suspension systems. The car was powered by a mini IC engine (4.6cc) which enabled it to reach speeds of upto 40kmph. The project was undertaken for participation in the event Full Throttle, Techfest, IIT Bombay, one of the largest technical college festivals in Asia. Manufacturing processes like Water Jet Machining and Aluinium Welding were used for the fabrication of aluminium parts.

Measurement of Bicep Muscle Contraction Strength using Electromyography (EMG)
While working on the Gesture Controlled Robot as a course project for the Course ME751 : Computer Aided Design, I somehow got a chance to lay my hands on a 2-channel surface EMG sensor kit. I quickly got it interfaced with an Arduino and developed a quick hack to visualize the EMG signals for the bicep muscle. A clear distinction was visible between the signal patterns for different levels of muscle activity. It was fun to play around with the sensor kit. A short video below shows the differences in muscle activity corresponding to different levels of the strength of contraction of muscle.
Line/Edge Following Robot
Built a fast and efficient line/edge following robot using an array of 5 IR sensors. The project was undertaken with a view to participate in an upcoming Edge Following Robot competition in Techkriti, IIT Kanpur's annual technical competition and one of the biggest of its kind in Asia. While just in our freshmen year, we stood 5th in the competition from amongst over a hundred national participating teams.
Wild Soccer : Soccer Playing Robots equipped with Offensive Capabilities.
Designed and fabricated a team of wireless manually controlled robots that can successfully steer a ball to the opponant's goalpost while also offensively tackling the opponent's bots on the way. Emerged victorious in the Wild Soccer event in Takneek. Such competitions are wildly famous amongst Robotics enthusiasts around the world, a notable example being Robowars held in Australia.
Street Markets, Yahoo HackU IIT Kanpur 2012
Street Markets is an android app cum web based platform aimed to enable the small, lesser privileged private retail store owners in smaller Indian cities to leverage the immense power of web based online shopping portals. Not only do online shopping portals empower the potential customers by providing them the luxury of shopping for goods and services with the touch of a button, but they also benefit the sellers by exposing their goods and services do a much larger online community. Often, small retailers do not have sufficient technical expertise and know-how to launch and maintain an effective online shopping portal. Moreover, poor and expensive internet connectivity in most rural parts prevent retailers from going online.
Street Markets attempts to bridge this gap, levaraging the smartphone revolution in small towns and cities. It enables the sellers to maintain an online record of their inventory and pricing options without the use of internet. The sellers can scan the barcodes printed on the products to be sold and input the number of products available in inventory along with its price and the data is then sent to a web based server using the cellular network over an sms instead of internet. The web based platform then creates a personalized online portal for the seller which can then be searched for particular products by the customers. The idea was conceived and developed as a part of a 24 hour long hackathon conducted by Yahoo India.
URL for the Hack : Click Here
Academic Projects
Path Planning for terrestrial robots using Randomly Exploring Random Trees(RRTs)
Course Project for the Course ME766 : Robot Motion Planning, Sep’2013-Oct’13
Abstract : The project dealt with the implementation of a path planning algorithm for a 2-D workspace based on RRTs using a complex spatial data-structure called kdTrees (k-dimensional trees). Dynamic visualization for the path planning process using 2D graphics in Python was also developed.
Hand Gesture Controlled Robot
Course Project for the course ME751 : Computer Aided Design, March’14-April’14
Abstract : The project concerned with the design and implementation of a wearable glove that would enable the user to track the movement of the hand on two axes - yaw and pitch. An Inertial Measurement Unit coupled with a Arduino Micro was mounted on the glove to accomplish the task and proportional control for a mobile robot was implemented. Have a look at the video below to watch the device in action.
Computation of Optimal Solutions for a variation of a Puzzle named Inertia
Course project for ME752 : Optimization methods in Engineering Design
Abstract : Inertia is an interesting and a fun to play puzzle developed by Simon Tatham(MIT). Finding the most optimum solution for this puzzle is not an easy problem in combinatorial optimization. Even the inbuilt Autosolve function in the game often does not match the best possible solution a human can come up with after a few minutes of thought, though it does provide a viable solution. This project deals with finding optimum solutions to a simplified version of the puzzle. The problem was reduced and formulated into a variation of the Travelling Salesman Problem which was then solved using traditionally available methods.
Stair Climber Robot Design and Simulation
Course Project for ME251 : Engineering Design and Graphics
Abstract : The project required the students to conceptualize a design for a stair climbing robot and present a video demonstrating the assembly of the robot using an Autodesk Inventor simulation. The video has been presented below.
Manufacturing of a 4-Speed Manual Transmission Gearbox
Course Project for TA102 : Introduction to Manufacturing Processes
The motivation of the project was to study the gear shift mechanism in a 4 speed transmission gearbox in actual cars and to subsequently design and manufacture a simplified version of this mechanism using the traditional laboratoy processes avaiblable in a mechanical workshop like lathe machining and milling etc.
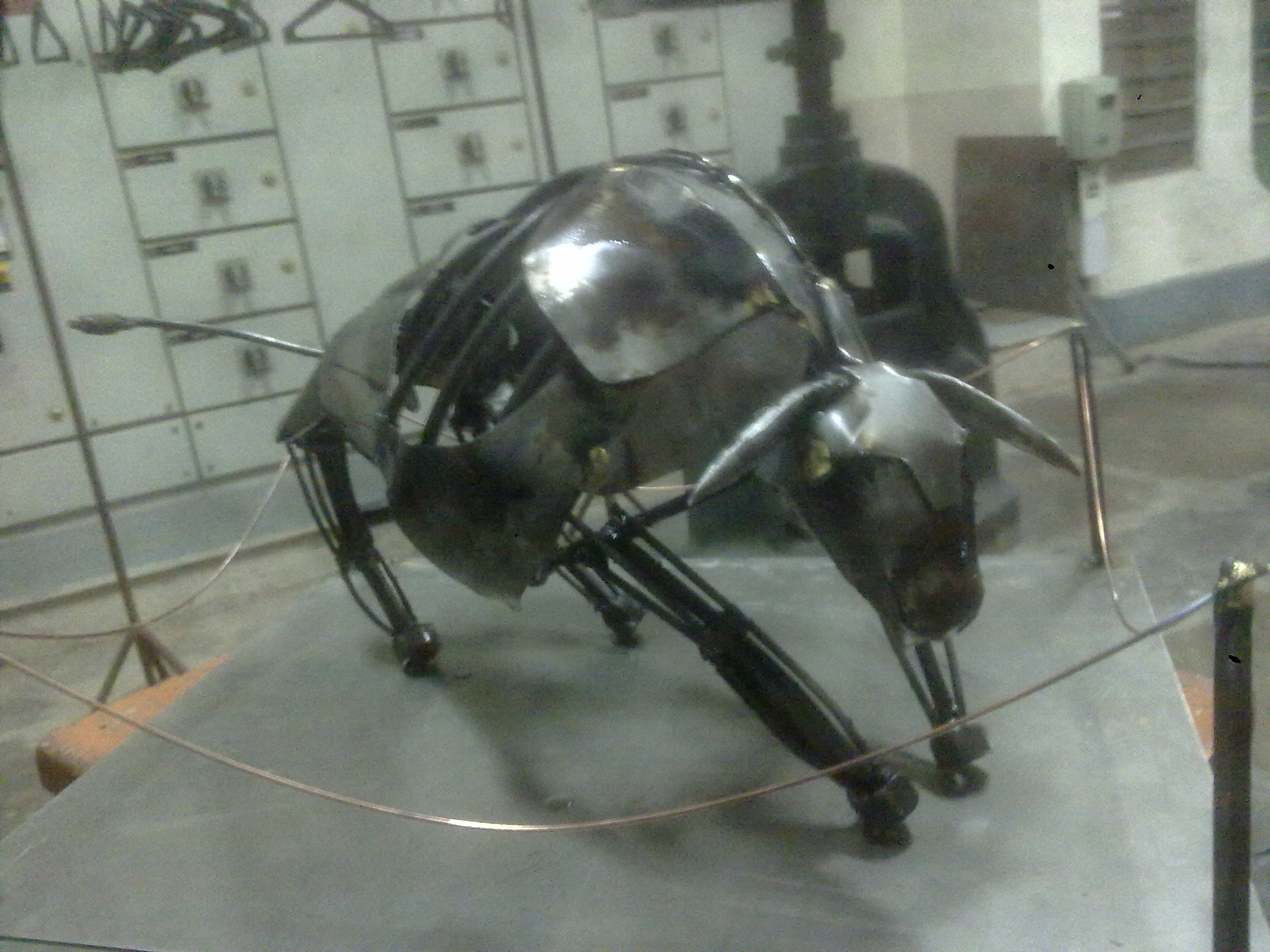
Design and manufacturing of an aesthetic model of a Mechanical Bull
Course Project for TA102 : Introduction to Manufacturing Processes
The aesthetic beauty of the Spanish Bull at the Wall Street happens to be the inspiration for this project. A modified version of the statue was designed and manufactured laboriously in a mechanical engineering workshop using traditional processes like sheet metal working, brazing, welding and casting etc.

Term Papers
A. Agrawal and A. Srivastava,
Computation of Stationary Points for Arbitrary n-variable Functions
Term paper for Course ME752: Optimization Methods in Engineering, Jan’14-Apr’14
Developed the code for computation of saddle points and local extrema in arbitrarily complex functions of n-variables. Visualizations were also developed for analyzing the stationary points for functions in 2-variables in Matlab.
Presentation
A. Jain and A. Agrawal,
Simulation of an A-Star Algorithm based Motion Planning Strategy for Soccer Playing Robots
Term paper for Course ME766: Robot Motion Planning, Jul’13-Nov’13
Analyzed the applicability of A-Star Graph search algorithm in an offensive strategy for Soccer playing robots. A Simulation was done for a 2D Soccer game with a team of 3 robots each, on MATALB. Studied the impact of computational complexity of planning algorithm, team formation and passing strategy, on chances of Winning.
Term Paper pdf
A. Agrawal and R. Katiyar,
Path Planning for Mobile Robots using QuadTrees
Term paper for Course ME762: Introduction to Robotics, March’13-Apr’13
Implemented the A-Star Search algorithm on a map broken down into a spatial QuadTree for planning the path of a mobile robot from a given starting point in a map to an end point, avoiding all obstacles.